
|
ロボカップは、“2050年までに人間のサッカーワールドカップのチャンピオンチームに勝つ、完全自律型ロボットチームを開発する”ことを目的とした国際研究プロジェクトである。 ロボカップの研究開発の過程で生み出される技術を、社会的な問題の解決や産業の発展に応用してゆく。 |
|
我々Fusionは自律型サッカーロボットを開発し(Fig.1)、2001年からロボカップ中型機リーグに参加している。 中型機リーグでは、ロボットは完全自律型で、人間が試合中のロボットを操作することはない。 Fig.2のようなフィールド上で、4対4の試合を行う。フィールド内に存在する全ての要素に色が指定されている。 |
 |
 |
Fig.1 サッカーロボット
重さ 10.0 kg 最高速度 2.0 m/sec |
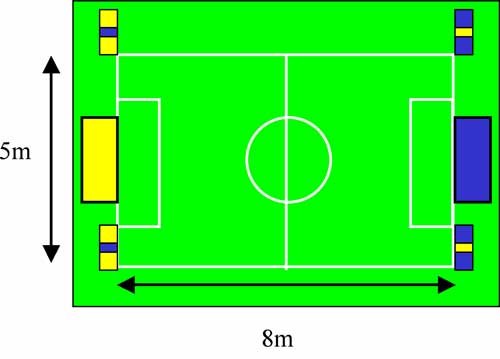 Fig.2 福岡・釜山大会のフィールド Fig.2 福岡・釜山大会のフィールド |
Fusion 過去の戦績 2001/8 シアトル世界大会 ベスト8 2002/6 福岡・釜山世界大会 ベスト8 |
|
サッカーロボットの構成 (1) |
|
 |
|
|
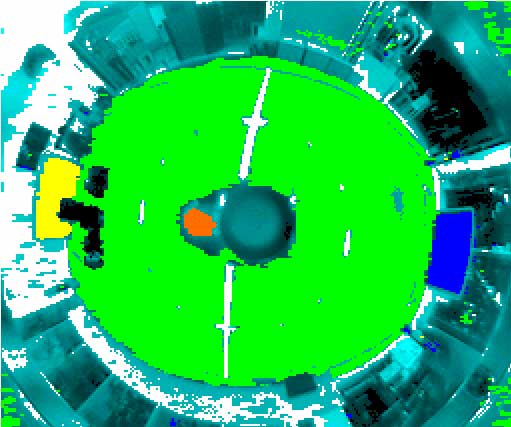
A.視覚システム ロボットは全方位カメラシステムを装備しており、ロボットの周囲360度を一度に見渡すことができる。 カメラ画像から、色情報をたよりに ボール、ゴール、他のロボットなど を認識したり、自分のフィールド上 での位置・向きを把握したりする。 |
 Fig.A_1 全方位カメラシステム |
 |
 |
|
A_2 全方位カメラ画像
|
Fig.A_3 画像処理の様子
|
|
サッカーロボットの構成 (2) |
|||||
| B.通信システム 無線通信システムを使って互いの位 置や行動意図を教え合い、ロボット同士が協調して行動する。 C.駆動システム
|
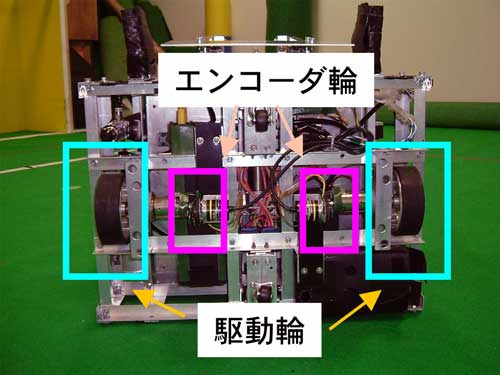 Fig.C_1: ロボット下面 |
||||
|
 |
||||
|
Fig.C_2: キック機構
|
|||||
D.演算システム A、B、Cの各システムから得られる情報を基に、どのように行動すれば、チームのために貢献できるかをロボット自身が判断する。 |
|||||
 |
○ ロボットの行動の例 ロボットがボールをキープし、シュートする場合を考える。まず、ロボットはボールに対して回り込みを行う。次に、ボールと敵ゴールが同じ方向にあれば、ボールを保持しに行く。ボールが保持できたら、ドリブルによりボールを敵ゴール付近までもちこみ、シュートをする。 |
||||
| 研究課題:ロボカップ参加による自律ロボットシステムの研究開発と課題達成型教育の実践 研究組織:システム情報科学研究院・工学研究院・情報基盤センター・福岡大学・日立プロセスエンジニアリング 審査部門:理工科学 採択年度:H13-H14 種目:C 代表者:長谷川 勉(システム情報科学研究院 教授) |
|||||