遺伝的アルゴリズムを利用した自動設計
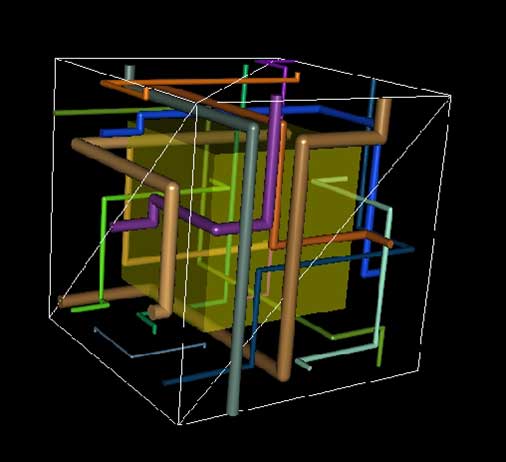 船内を複雑に走るパイプの配管設計問題
船内を複雑に走るパイプの配管設計問題
に生物の進化メカニズムを模倣した自動設
計方法を適用する研究に取り組んでいます。
船内を複雑に走るパイプの配管設計問題に生物の進化メカニズムを模倣した自動設
計方法を適用する研究に取り組んでいます。
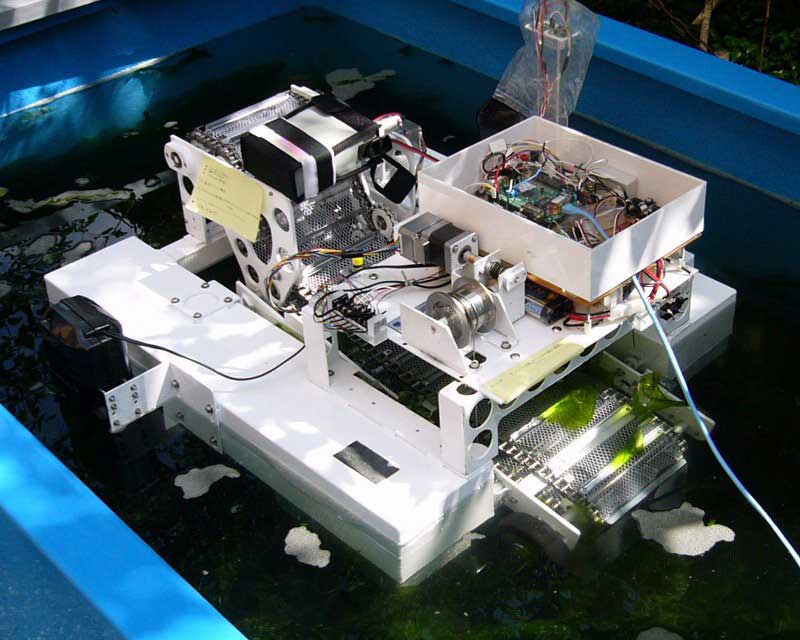
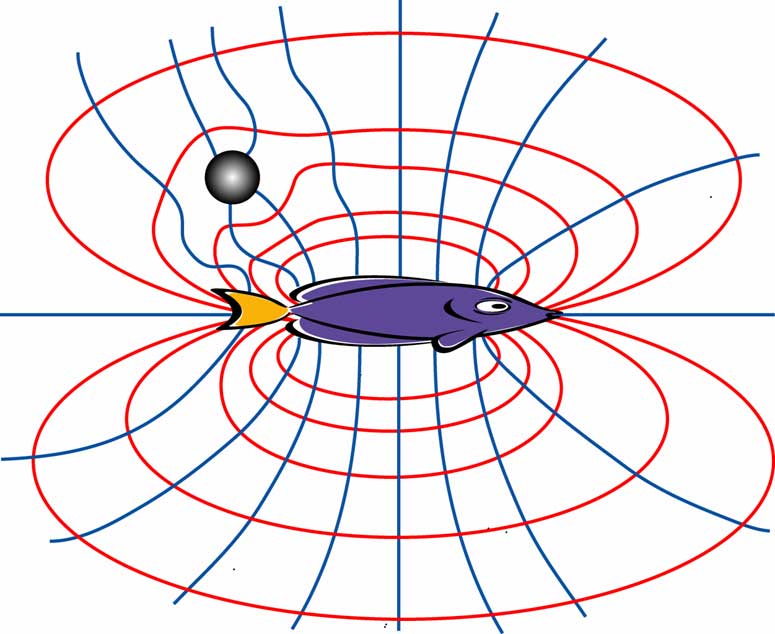
水中作業ロボットの開発
海洋は天然資源の宝庫として期待されて
いる一方で、人間の活動には適さない極限環境です。このような場所において人間にかわり危険な作業をおこなう作業ロボットの開発をめざし、アオサ回収ロボットや、電気魚が電気によって周囲を知覚するしくみを利用した新しい水中センサの実現に取り組んでいます。
 |
 |
|
アオサ回収ロボットの模型試験
|
新型水中センサのイメージ:
魚が電気で周囲を知覚する様子 |
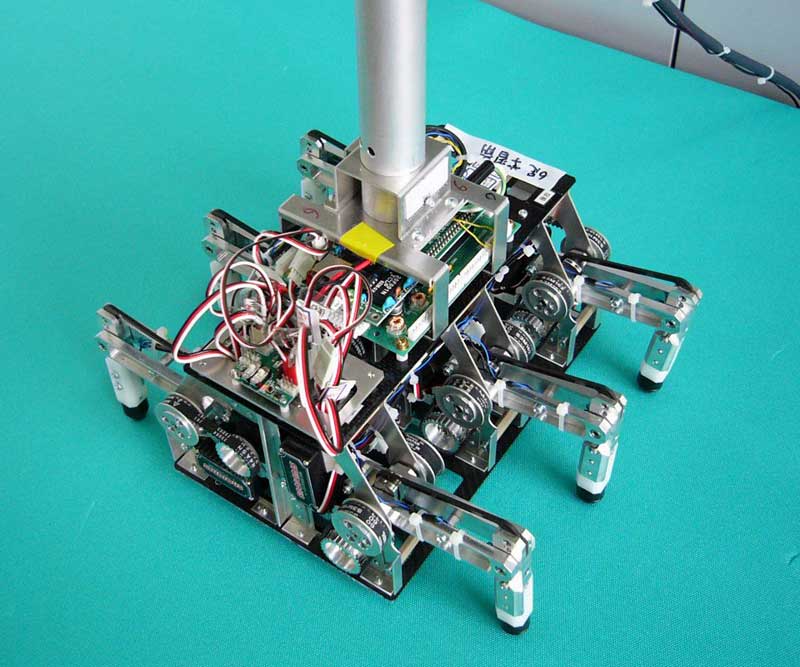 |
海中作業ロボットの動作学習を
行うための模型実験 |
パネル作成者:木村 元(九州大学大学院工学研究院 海洋システム工学部門)
フレームが表示されていない場合はこちら