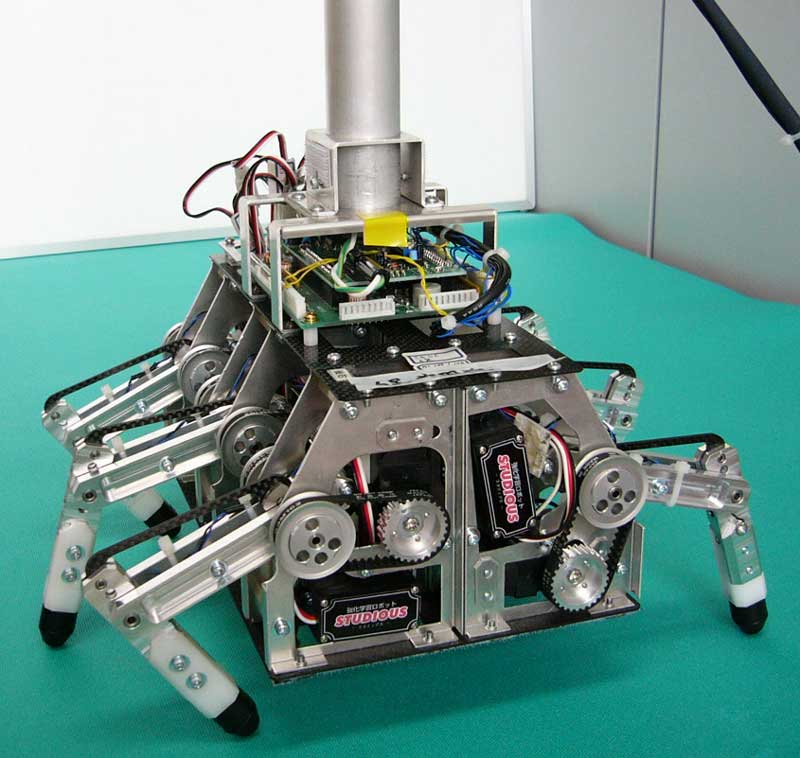
生まれたての人間はハイハイもできませんが、経験を積むと立って歩けるようになります。このロボットは、このように「経験を積んで動きかたを学ぶ」という生物のしくみを使って、海の中などの厳しい環境での動作獲得について研究するためのものです。このロボットは、最初のうちは歩けずにバタバタ動きますが、練習をするうちに上手に歩くようになります。
フレームが表示されていない場合はこちら
|
|
|
生まれたての人間はハイハイもできませんが、経験を積むと立って歩けるようになります。このロボットは、このように「経験を積んで動きかたを学ぶ」という生物のしくみを使って、海の中などの厳しい環境での動作獲得について研究するためのものです。このロボットは、最初のうちは歩けずにバタバタ動きますが、練習をするうちに上手に歩くようになります。
|
|
|
| 強化学習型(動作制御自己開発型)6脚歩行ロボット「スタディアス」 |
| パネル作成者:木村 元(九州大学大学院工学研究院 海洋システム工学部門) フレームが表示されていない場合はこちら |